Интеллектуальные системы навигации беспилотных аппаратов
24.03.02 Системы управления движением и навигация
О программе
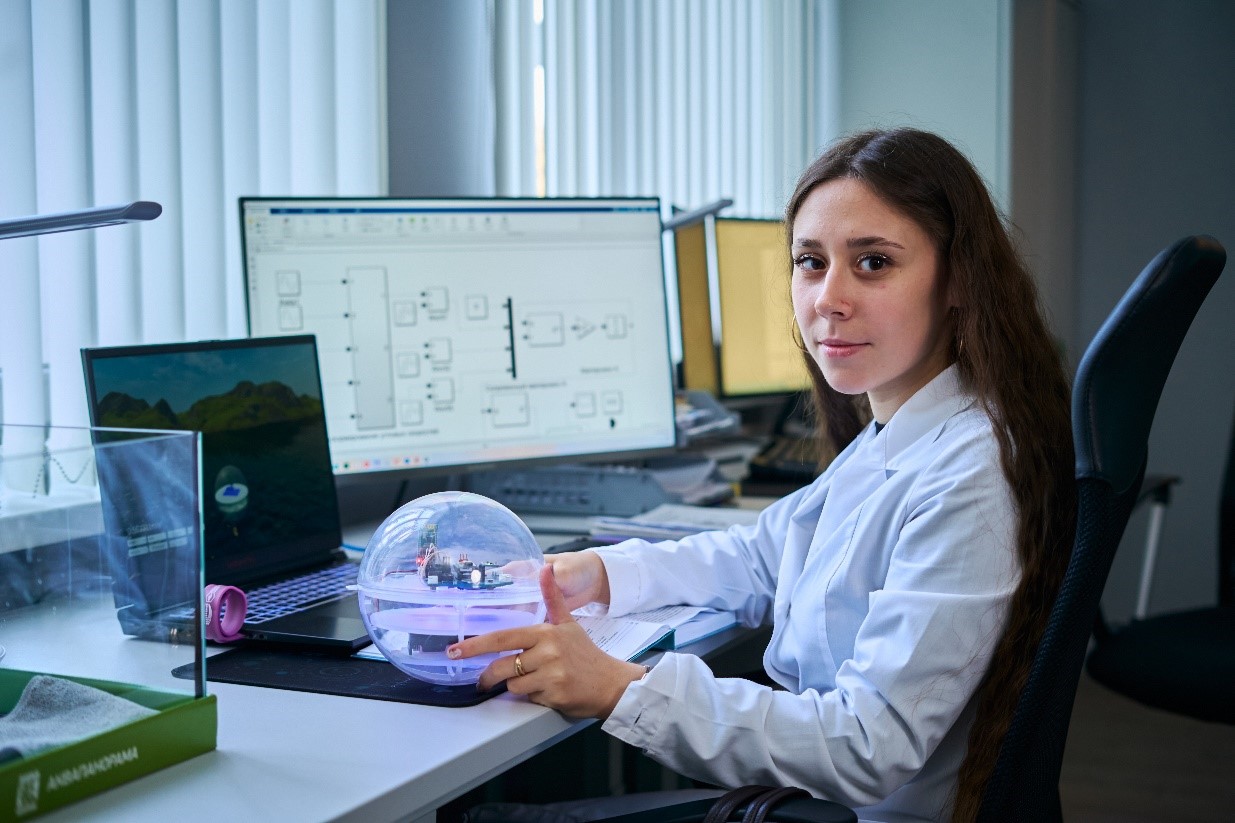
Интеллектуальные системы навигации обеспечивают надёжное и точное функционирование беспилотных аппаратов в любой среде — на земле, в воздухе, на воде и в космическом пространстве.
На стыке точной механики, микроэлектроники, теории управления и искусственного интеллекта создаются решения, способные автономно определять местоположение, скорость и ориентацию объектов без связи с внешними источниками. Ядром таких систем являются современные прецизионные гироскопы — от миниатюрных МЭМС-сенсоров до высокоточных волновых твердотельных и лазерных гироскопов. Именно на принципах инерциальной навигации, усиленных алгоритмами ИИ, работают самые ответственные системы: от полётных контроллеров беспилотников и наземных роботов до комплексов управления космическими аппаратами.
Спрос на специалистов в области систем управления движением и навигации растёт в ключевых отраслях: авиа- и ракетостроение, судостроение, разработка беспилотных комплексов, робототехника, производство высокоточного геодезического оборудования и оборонно-промышленный комплекс.
Программа «Системы управления движением и навигация» в ТулГУ – это прямой путь в команды, проектирующие автономные комплексы для беспилотников, авиации, робототехники, флота и космических аппаратов. Программа реализуется в стратегическом партнёрстве с ведущими предприятиями отрасли: АО «Конструкторское бюро приборостроения им. академика А.Г. Шипунова» (г. Тула) и АО «Раменский приборостроительный завод» (г. Раменское, Московская область), что гарантирует её практическую ориентацию и соответствие актуальным задачам высокоточной навигации.
Особенности программы
Практическое программирование «железа». Студенты получают глубокий практический опыт в программировании современных полётных контроллеров (Pixhawk, SpeedyBee и др.) и промышленных микроконтроллеров, создавая алгоритмы управления для реальных автономных систем, включая наземные робототехнические комплексы.

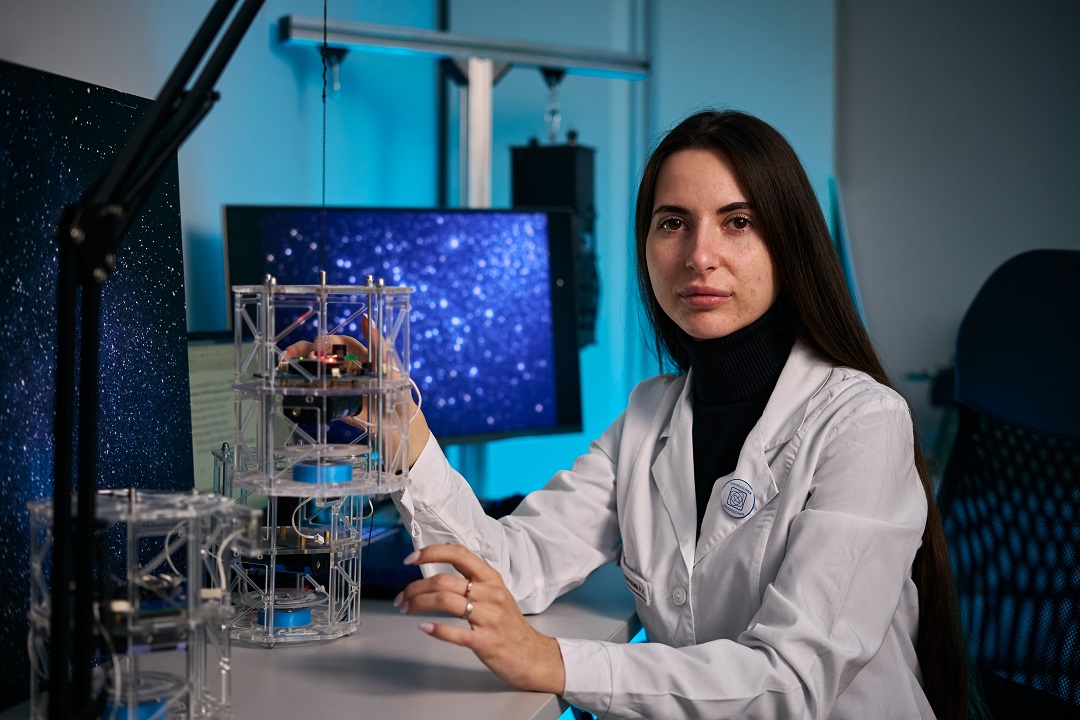
Работа с передовым навигационным оборудованием. Программа обеспечивает прямой доступ и изучение всего спектра современных сенсоров — от миниатюрных МЭМС-датчиков (акселерометров, гироскопов) до прецизионного оборудования навигационного класса: волновых твердотельных и лазерных гироскопов.
Сквозная интеграция с индустрией. Обучение построено на реальных задачах и технологических процессах стратегических партнёров — АО «КБП» и АО «Раменский приборостроительный завод». Это гарантирует, что выпускники владеют именно теми компетенциями, которые требуются рынку сегодня.

Военный учебный центр:
Для обучающихся очной формы обучения по программам бакалавриата и специалитета, предусмотрена возможность пройти подготовку по одной из военно-учетных специальностей подготовки в Военном учебном центре при ФГБОУ ВО «ТулГУ».
В случае успешного освоения программы, обучающимся присваивается воинское звание офицера или сержанта запаса.
Цифровая кафедра (бесплатное получение второго диплома по IT-программам):
Для студентов очной формы обучения, начиная со второго курса, доступно обучение по программам подготовки высококвалифицированных IT-кадров для цифровой̆ экономики России. В университет реализуются такие программы как:
– аналитика данных (для студентов, обучающихся по IT-направлениям, объем – 252 часа, продолжительность – 9 месяцев);
– программирование на языке Python (для студентов, обучающихся не по IT-направлениям, объем – 296 часов, продолжительность - 9 месяцев).
Тип программы: дополнительное профессиональное обучение с выдачей диплома о профессиональной переподготовке.
Руководитель программы
Телухин Сергей Владимирович, доцент кафедры «Приборы управления», к-т техн. наук.
Область научных / профессиональных интересов: инерциальная навигация, прикладная теория гироскопов, гироскопические стабилизаторы, МЭМС.
Автор более 50 научных работ, 2-х учебных пособий.
План набора1:
| Форма обучения | Бюджетные места | Целевая квота | Особая квота | Отдельная квота | Платные места |
|---|---|---|---|---|---|
очная |
24 | 5 | 3 | 3 | 15 |
Стоимость платного обучения2:
| Форма обучения | Полный срок | Ускоренное обучение |
|---|---|---|
очная |
228 000 ₽/год |
- |
Вступительные испытания3 (минимальный балл):
Математика (40)
Русский язык (40)
Информатика и ИКТ (46) или Химия (40) или Физика (41)
1 План набора указан для 2026 года.
2 Стоимость обучения указана для 2026 года.
3 Перечень вступительных испытаний для поступающих на программы подготовки.
Обучение
Программа построена по траектории «от фундаментальных законов механики и теории управления — к созданию интеллектуальных навигационных систем», где каждый этап подкреплён практикой на передовом оборудовании ТулГУ и реальными задачами индустриальных партнёров.
1–2 курс. Фундамент для работы с движением и информацией. Студенты погружаются в высшую математику, теоретическую механику, основы автоматического управления и алгоритмизации. Практика начинается сразу: на ознакомительной практике они изучают устройство и принципы работы современных навигационных систем, знакомятся с датчиками движения и процессами обработки сигналов в реальном времени.
3–4 курс. Специализация на стыке навигации, управления и искусственного интеллекта. На этом этапе происходит углублённая подготовка к созданию автономных интеллектуальных систем. Студенты осваивают ключевой комплекс дисциплин, формирующий профиль разработчика современных навигационных комплексов. Курсы «Математические основы управления и навигации» и «Общая и прикладная теория автоматического управления» закладывают фундамент для синтеза систем управления движением. «Искусственный интеллект и нейронные сети» становятся основным инструментом для реализации адаптивных и интеллектуальных алгоритмов навигации, изучаемых в рамках дисциплины «Интеллектуальные системы навигации», которая также включает практический блок по программированию полетных контроллеров и получению навыков пилотирования и управления БПЛА. Глубокое понимание физических принципов и устройств обеспечивается курсами «Инерциальные и интегрированные навигационные системы» и «Основы конструирования гироскопических приборов». Вся полученная теоретическая база консолидируется в сквозном инженерном проекте, где студенты, к примеру, разрабатывают и отлаживают на стенде систему автономной навигации мобильного робота, объединяющую данные инерциального блока, спутникового приёмника и компьютерного зрения.
Темы дипломных проектов:
- Разработка и исследование адаптивного алгоритма комплексирования данных бесплатформенной инерциальной навигационной системы (БИНС) на базе МЭМС-датчиков и спутниковой навигационной системы (СНС) для городских условий.
- Синтез метода коррекции инерциальной навигационной системы автономного подводного аппарата по гидроакустическим маякам и данным доплеровского лага.
- Разработка и программно-аппаратная реализация алгоритма комплексирования данных инерциального измерительного модуля и оптической одометрии на основе компьютерного зрения для навигации беспилотного аппарата в условиях отсутствия GPS.
- Проектирование системы астроориентации малого космического аппарата на базе миниатюрной звездной камеры и волнового твердотельного гироскопа.
- Синтез и моделирование системы управления ориентацией беспилотного летательного аппарата вертолётного типа с использованием нелинейных методов управления.
Ключевые дисциплины
Ключевые дисциплины
Общая и прикладная теория автоматического управления (изучение математических методов анализа и синтеза систем управления динамическими объектами).
Интеллектуальные системы навигации (изучение принципов проектирования автономных систем, включая программирование полетных контроллеров и работу с визуальными навигационными системами, применение ИИ в навигационных системах).
Инерциальные и интегрированные навигационные системы (изучение принципов построения и алгоритмов работы автономных навигационных систем на основе инерциальных датчиков с применением методов оптимальной фильтрации).
Микропроцессорная техника систем ориентации, стабилизации и навигации (изучение архитектуры и практическое программирование микроконтроллеров для реализации алгоритмов управления движением).
Основы конструирования гироскопических приборов (изучение принципов устройства, конструкции и функционирования гироскопических приборов различного назначения).
Практика
В учебном плане предусмотрены различные виды практики, которые помогают студентам получить необходимые навыки и компетенции для будущей профессиональной деятельности.
Ознакомительная практика. Первичное погружение в профильную среду предприятия-партнёра для изучения структуры, основных технологических процессов и применяемого навигационного оборудования.
Вычислительная практика. Приобретение навыков математического моделирования, обработки данных и алгоритмизации в специализированных программных средах (MATLAB, Python) для решения задач ориентации, навигации и управления.
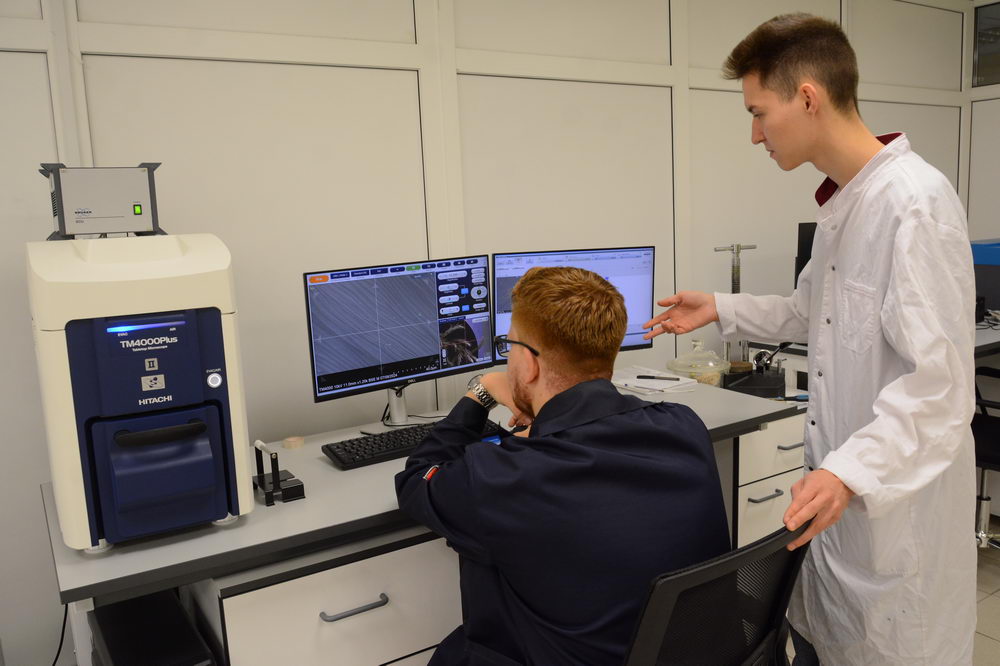
Информационно-измерительная практика. Освоение принципов работы, метрологических характеристик и методов обработки сигналов от современных датчиков (инерциальных, спутниковых, оптических) на измерительных стендах.
Технологическая практика. Изучение полного цикла производства и сборки компонентов навигационных систем, включая работу с паяльным, монтажным и контрольно-измерительным оборудованием.
Проектная практика. Участие в составе инженерной команды в выполнении реального этапа опытно-конструкторской работы (ОКР) по тематике кафедры, от постановки задачи до реализации прототипа или алгоритма.
Преддипломная практика. Целенаправленная работа на предприятии-партнёре по сбору материалов, экспериментальных данных и детальной проработке раздела будущей выпускной квалификационной работы.
Практика
Партнеры и работодатели

Студенты
Наши студенты увлечены миром точной механики, электроники и сложных алгоритмов, стремясь разобраться в принципах работы автономных систем. Это будущие инженеры-навигационщики, которые сочетают строгое аналитическое мышление с практической смекалкой. Они способны декомпозировать сложную задачу — будь то стабилизация дрона или синтез алгоритма коррекции для подводного аппарата — на последовательность логических шагов. В их работе нет места абстракциям: каждая идея проверяется математическим моделированием, а затем реализуется в коде и «железе».
Это прирожденные командные игроки, понимающие, что создать надежную навигационную систему в одиночку невозможно. Они умеют слушать, распределять роли в проекте и брать на себя ответственность за свой модуль. При этом они готовы к нестандартным ситуациям: сбою датчика, потере сигнала или неучтенной внешней помехе, находя эффективные решения в условиях неопределенности.
Наш студент — это исследователь, который не просто использует готовые библиотеки, а понимает физику процессов в гироскопах и акселерометрах. Он умеет ясно и убедительно представить свои решения, будь то чертеж, схема алгоритма или отчет по испытаниям. Он осознаёт, что его работа — это вопрос безопасности и надежности, где ошибка в расчетах имеет прямые последствия. Его мотивация — не просто получить диплом, а стать создателем «мозга» для машин, способных самостоятельно ориентироваться в этом мире.
После обучения
Профессиональные навыки и компетенции
Профессиональные навыки и компетенции
Разработка и анализ алгоритмов интеллектуальной навигации, управления и ориентации БПЛА.
Знание и применение теории бесплатформенных инерциальных навигационных систем (БИНС), включая обработку сигналов датчиков (гироскопы, акселерометры, магнитометры).
Умение работать с навигационной информацией от спутниковых систем (GPS, ГЛОНАСС), систем технического зрения, лидаров и других внешних датчиков.
Разработка и моделирование алгоритмов оценки состояния (фильтры Калмана и их нелинейные модификации), сенсорной интеграции и построения комплексных навигационных решений.
Знание основ теории управления для динамических объектов (БПЛА).
Моделирование динамики и кинематики БПЛА в средах (Matlab/Simulink, Python).
Проведение полунатурного и программного моделирования навигационных комплексов.
Проектирование архитектуры интеллектуальных навигационных систем с учетом требований точности, надежности и помехоустойчивости.
Анализ точностных характеристик и погрешностей навигационных систем.
Где реализовать себя
1. Аэрокосмическая и оборонная промышленность
(инженер-программист, разработчик алгоритмов управления, системный инженер БПЛА, разработчик систем автономной навигации)
2. Робототехника и автономные транспортные системы
(специалист по автономной навигации, инженер-робототехник, разработчик систем технического зрения)
3. IT-сектор и R&D-центры
(алгоритмист/программист (C++, Python, Matlab), специалист по машинному обучению в навигации,разработка ПО для симуляторов, систем обработки данных датчиков, алгоритмов компьютерного зрения и AI для автономных систем в R&D-отделах крупных компаний или tech-стартапах)
4. Геоинформационные технологии и мониторинг
(инженер по эксплуатации БПЛА, специалист по аэрофотосъемке и лидарному сканированию, применению БПЛА для картографии, сельского хозяйства, мониторинга объектов инфраструктуры; настройка и калибровка специализированного навигационного оборудования)
5. Наука и образование
(научный сотрудник, инженер-исследователь, преподаватель/ассистент в вузе, проведение фундаментальных и прикладных исследований в лабораториях, участие в грантах, подготовка научных публикаций, преподавание и руководство студенческими проектами).
Где реализовать себя

Создавай будущее. Управляй движением.
Специальность для тех, кто хочет программировать не код, а реальность. Разрабатывай интеллектуальные системы навигации для дронов, роботов и космических аппаратов. Начни карьеру в самой динамичной индустрии XXI века.
Как поступить?
Готовимся к поступлению
Стипендии ТулГУ
Академическая стипендия
2 980 рублей
Выплачивается всем студентам первого курса до сдачи первой аттестации или студентам, обучающимся на «хорошо» и «отлично» при количестве оценок «отлично» меньше или равным количеству оценок «хорошо»
Академическая стипендия «4+»
3 695 рублей
Выплачивается студентам, обучающимся на «хорошо» и «отлично» при количестве оценок «отлично» больше количества оценок «хорошо»
Академическая стипендия «5»
5 130 рублей
Выплачивается студентам, обучающимся на «отлично»
Повышенная «1 уровень»
34 000 рублей
Назначается за достижения в учебной, научно-исследовательской, общественной, культурно-массовой и спортивной деятельности. Студенту должна быть назначена государственная академическая стипендия.
Повышенная «2 уровень»
17 000 рублей
Назначается за достижения в учебной, научно-исследовательской, общественной, культурно-массовой и спортивной деятельности. Студенту должна быть назначена государственная академическая стипендия.
Повышенная «3 уровень»
8 500 рублей
Назначается за достижения в учебной, научно-исследовательской, общественной, культурно-массовой и спортивной деятельности. Студенту должна быть назначена государственная академическая стипендия.
Повышенная «7 уровень»
3 500 рублей
Назначается за достижения в спортивной деятельности. Студенту должна быть назначена государственная академическая стипендия.
Социальная
3 480 рублей
Назначается студентам, относящимся к одной из социальных категорий. Размер выплаты рассчитывается со дня подачи документов
Повышенная социальная
9 480 рублей
Назначается студентам 1 и 2 курса, получающим социальную стипендию и имеющим успехи по результатам промежуточной аттестации
Президента и правительства РФ
до 7 000 рублей
Региональные
до 20 000 рублей
Именные
до 20 000 рублей
Узнайте больше о студенчестве в ТулГУ






Начните своё обучение сегодня!
Стань частью нашего сообщества!